
室内SLAM
AR定位
以见科技
厘米级定位
室外RTK
文|以见科技CTO蒋童
如需转载请联系我们获得授权
现状
——建筑施工、运维现场,对室内外的定位诉求一直存在
建筑与市政工程生命周期中,土建施工阶段作业环境和精度需求非常特殊,往往测绘水平要达到厘米级或者毫米级,所以对硬件设备定位准确度要求高,全站仪与RTK为这个场景下的主流定位设备。在建筑物安装工程阶段和建设完成后的运维阶段,室内外定位需求仍然存在,但定位精度要求稍显宽裕,激光测量与有源信号辅助定位等方法,在办公室、家庭、工厂等室内场景得到了广泛应用,而GPS等室外定位方法,覆盖面积广、信号稳定,基本能满足人们在室外的日常定位需求。

随着建筑数字化转型的产业趋势,以及各类应用与功能对于建筑室内外定位数据的获取与接入,一套行之有效的建筑与市政工程室内外定位技术与解决方案成为一个强烈需求。如Trimble、Hexagon、Topcon等大型集团公司已经有着成熟的软硬件解决方案,包括以见在内的许多初创公司也在探索新的行之有效的技术手段,来提供定位能力,提升BIM数据和AR可视化的价值。
当下解决方案的弊端
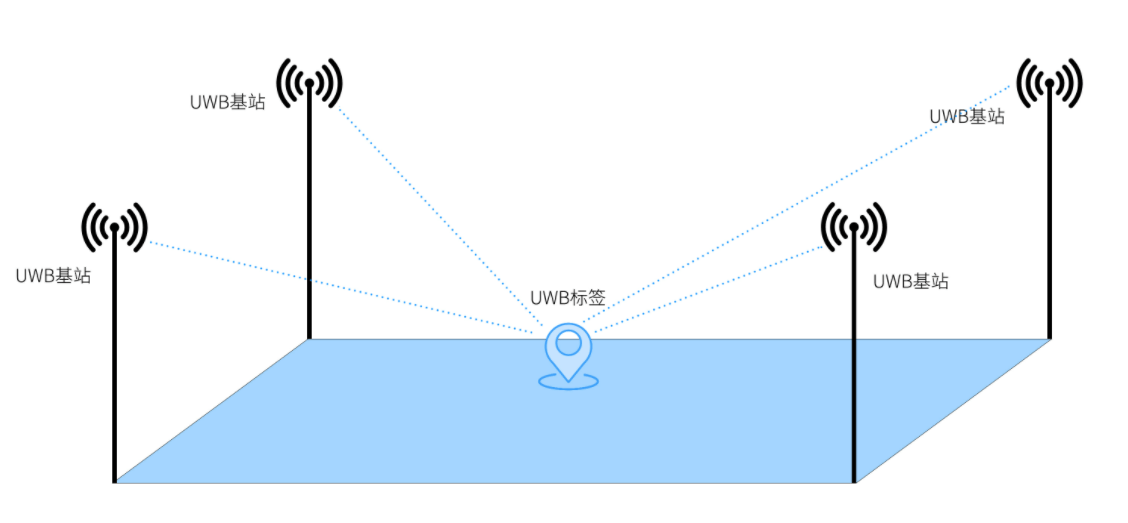
UWB定位方法示意图
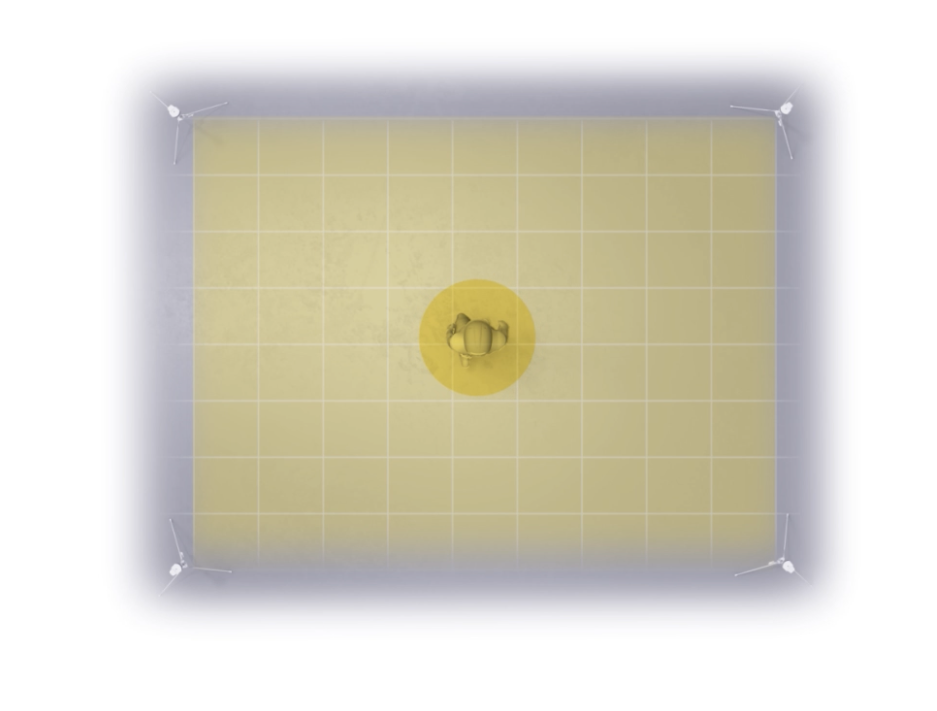
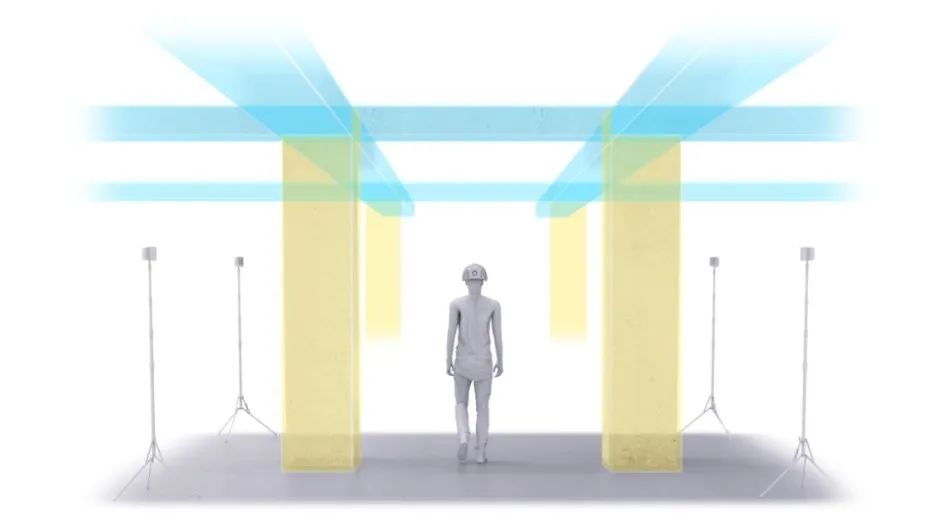
Lighthouse定位:
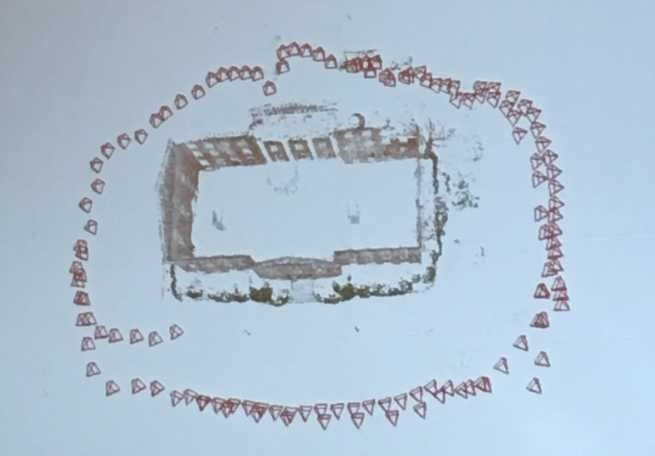
融合RTK初始定位和SLAM持续定位的室外定位方案:
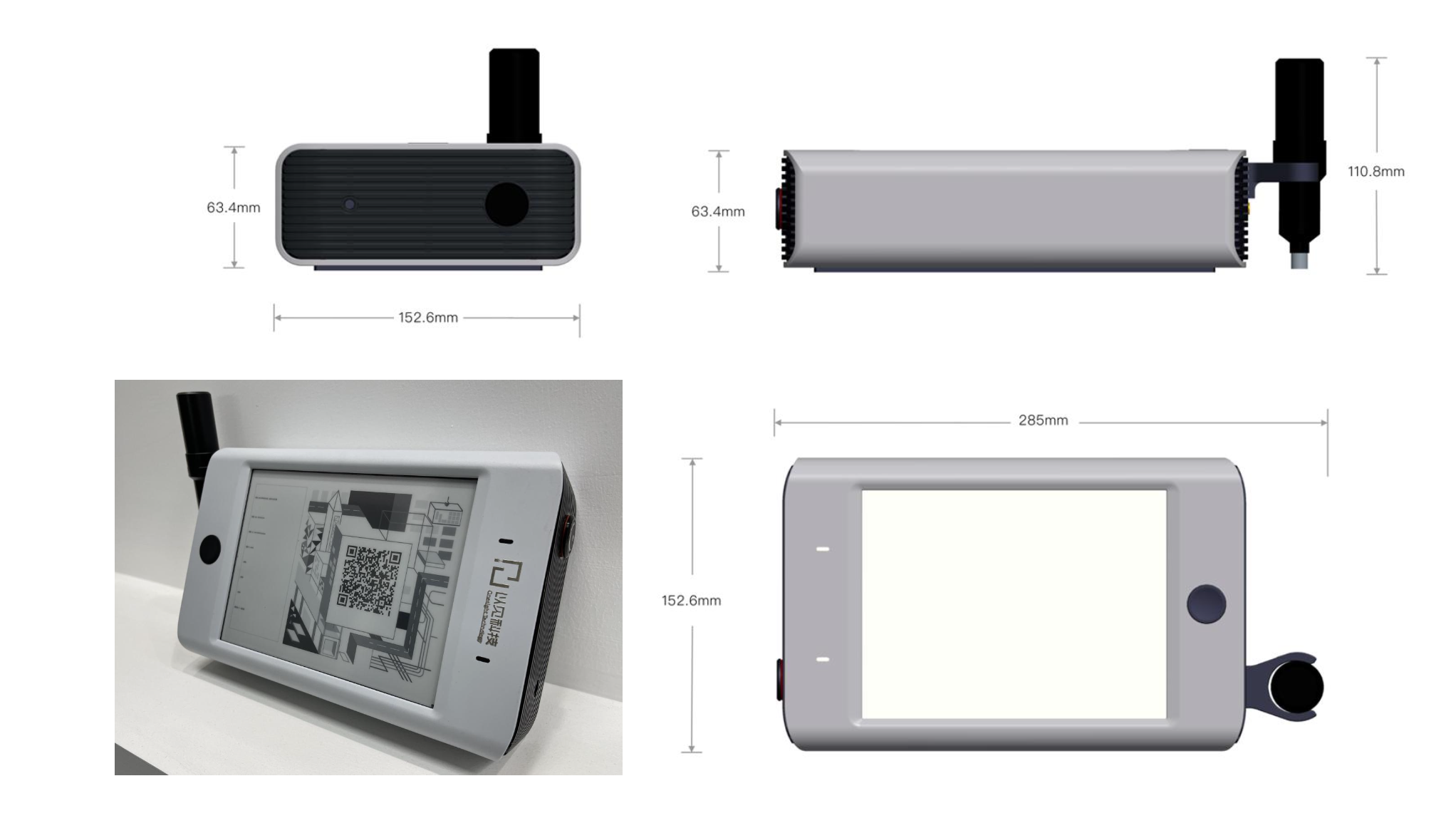
以见科技自研的智能定位硬件设备
用户通过手持移动设备和一见AR智能定位设备,获得RTK给定的定位点GPS信息,并对RTK获得的定位点GPS信息进行处理,获得定位点在大地坐标系中的坐标;通过坐标转换算法,将大地坐标系转换为空间直角坐标系,达成空间直角坐标系与AR中世界坐标系的统一,而后在移动设备上,通过屏幕绘制与映射,完成AR图像在真实位置的叠加。
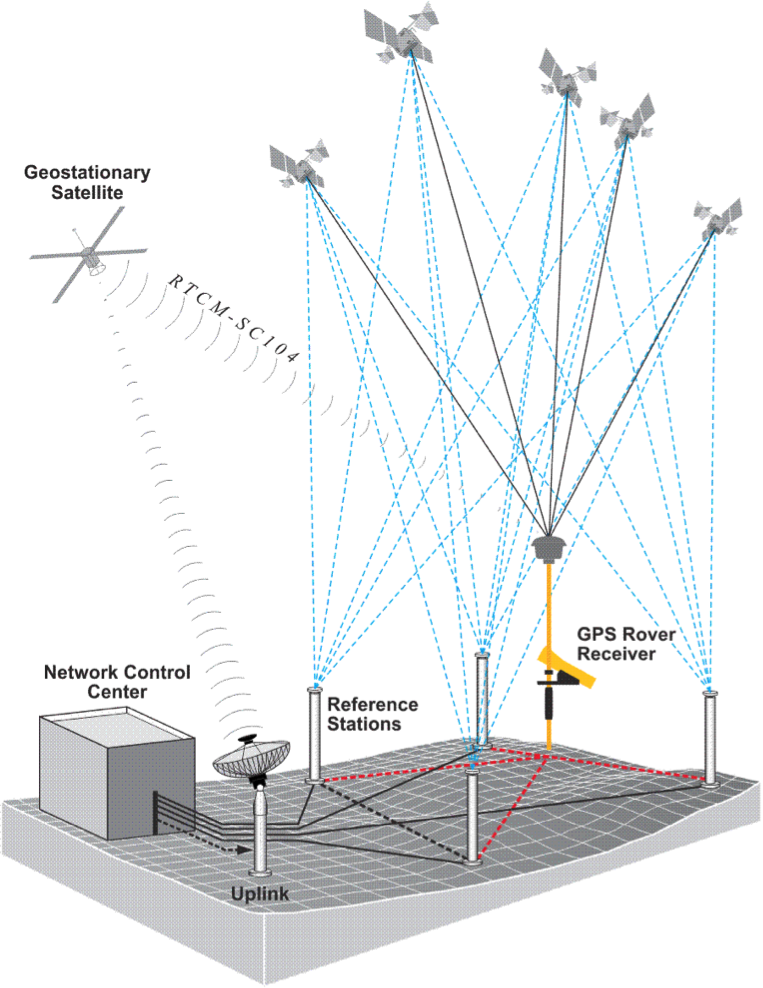
GPS动态测量
该技术能够实现增强现实场景(虚拟世界)与真实场景的高精度叠加,而且整个过程中可实现增强现实场景与真实世界的坐标实时同步,通过特征匹配和坐标系对齐的方式,与真实建筑空间匹配,精度可以达到5厘米左右。

多种算法统一坐标系(室内建筑三维坐标系和室外GIS坐标系):
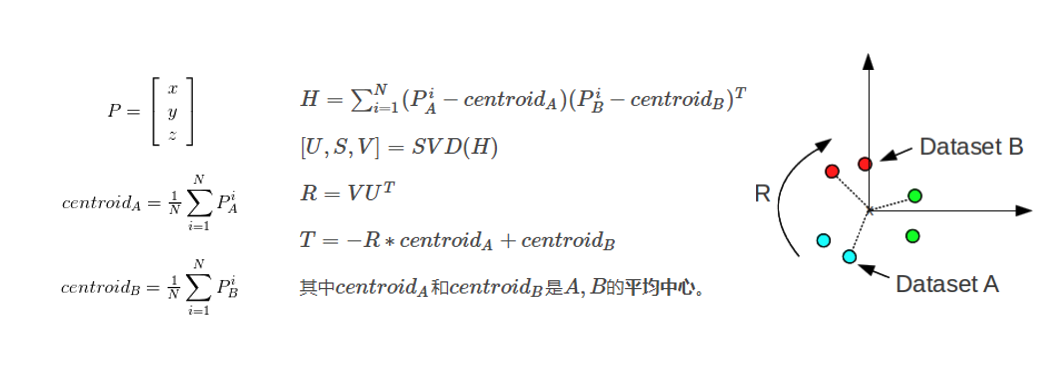
欧几里得变换
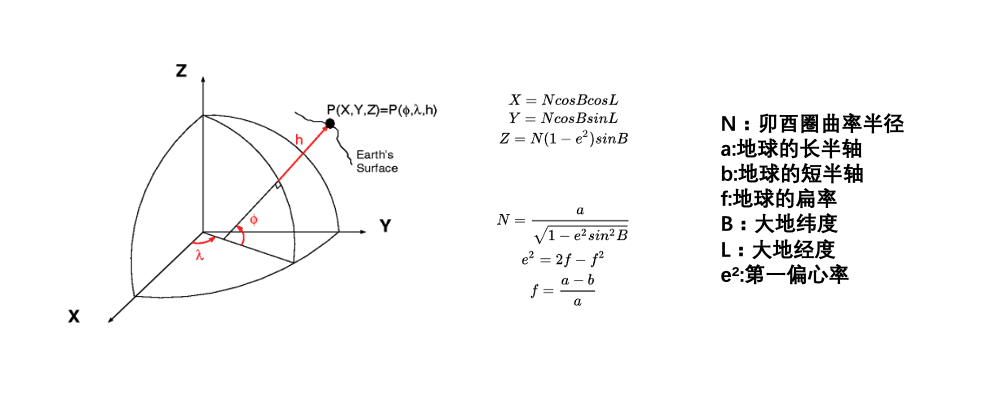
球面坐标系和直角坐标系变换
我们建立了多套基于四元数、欧拉角、旋转矩阵和旋转向量方法的坐标系转换体系,同时将其应用在一见AR系列软件软件内内置贴码工具、内置坐标对齐工具中,达到了多种定位信息的转换与坐标信息的统一,为未来应用中基于BIM空间位置和GIS系统进行功能设计提供了技术基础。
方案技术特性与优点
⚫ 无需在工程现场加装或配置硬件设备、有源传感器等,或进行预先调试
⚫ 无需采购特定设备或辅助装置
⚫ 可直接使用软件中预制的快速贴码和对齐、微调的工具
⚫ 联动标准规格的纸质二维码打印,进行快速张贴
⚫ 使用移动设备一扫便可进行初始定位
我们依托200+个商业项目案例,以及上千试用客户案例,积累了丰富的建筑工程现场服务经验,以见的客户成功工程师能够结合真实工地情况,搭配数种定位方案与AR显示与优化方案,完成软硬件定位功能对建筑工程现场一线的服务与优化,为客户提供便捷与高效的软硬件定位能力。

室内和室外定位精度与连续性的平衡:
以见的各条产品线在以下工程场景内密集使用AR定位与显示技术:
⚫ 建成前现场模拟
⚫ 承台开挖放线
⚫ 预埋管线验收
⚫ 土建预留孔洞施工复核
⚫ 钢结构安装复核
⚫ 机电管综安装指导、验收
⚫ 精装修指导、验收
⚫ 竣工后运维应用

具体场景中涉及使用AR定位技术
我们也在持续探索如何优化室内外定位精度,包括更新VIO算法,设备加装SLAM模组、优化AR扫码初始定位方式和连续定位方式,更新迭代一见AR智能定位设备版本等,最终希望室内外定位方法的精度和连续性能够满足建筑工程和市政工程的应用。
统一全局坐标体系便利后续功能应用:
在软件应用中统一各类坐标系,并建立一个标准的度量准则和尺度标准后,能为我们的软件带来一系列的技术优势。
GIS体系对接:
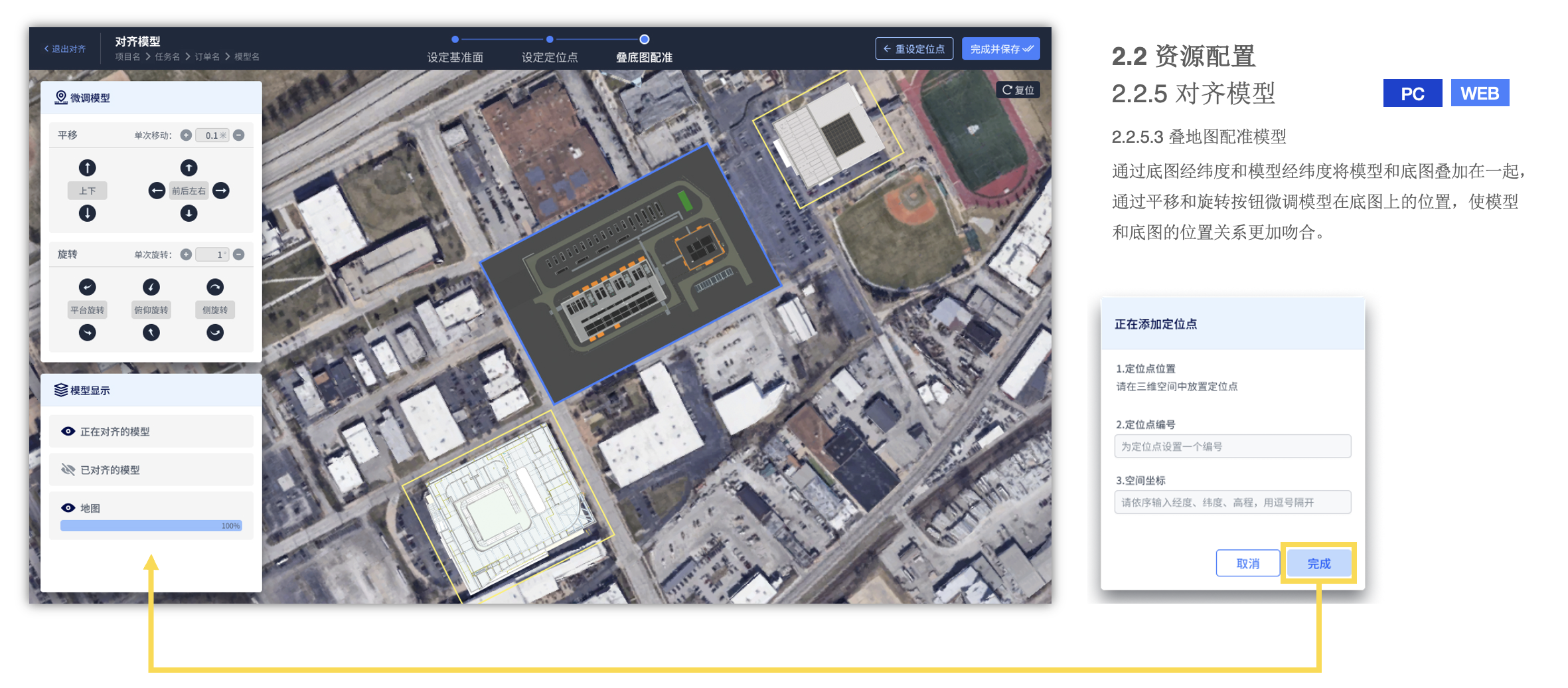
GIS底图叠加

模型和底图叠加更精确,为室外AR应用带来支持
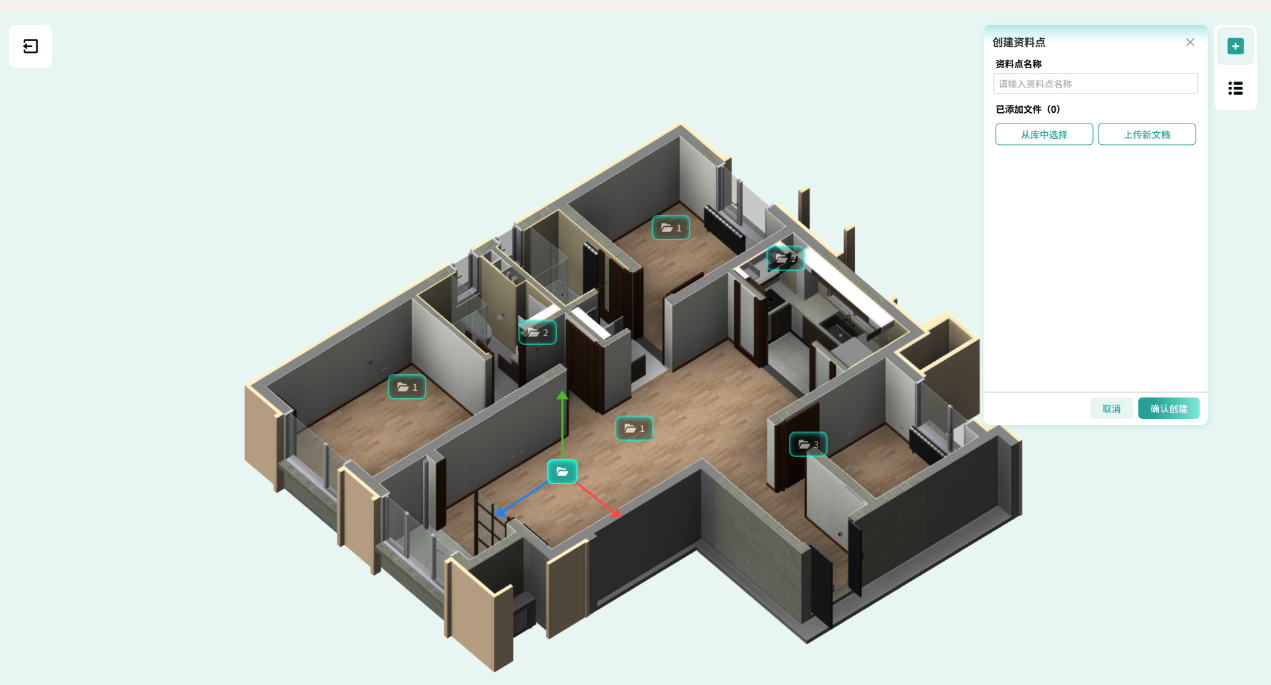
空间中工单与资料挂接:
传感器位置关联:
在建筑工程和市政工程施工和运维场景中,我们会进行各类传感器数据的采集,在采集后需要将这些传感器数据与GIS系统或者BIM模型绑定,打通现场工程管理和远程运营管理的信息屏障。各类BA数据与IoT数据可以通过GIS坐标定位和BIM空间定位,在虚拟世界中复现数据源的相对位置,并在实际现场1:1查看与还原,楼宇运行情况和市政运维情况一目了然,大大降低信息传递的成本和壁垒,可以全程跟踪数据反应的问题的解决情况,达到基于空间和定位信息的数据治理。
定位技术在产品中的运用
一见®BIM+AR施工助手(室内定位和室外定位)
一见®BIM+AR运维助手(室内定位)
一见®BIM+AR市政平台(室外定位)
基于SLAM+RTK的室内外综合定位技术,目前系统内提供以下几种定位方法:
室内定位
- 二维码定位:二维码中包含模型的定位信息。通过App扫描现实环境中的二维码,即可展现场景中已准确定位的模型。

二维码定位
- 两点定位:依次选取模型中的两点和现实中的对应两点,建立虚拟模型和现实环境的映射,用于在视窗中准确的放置虚拟模型。
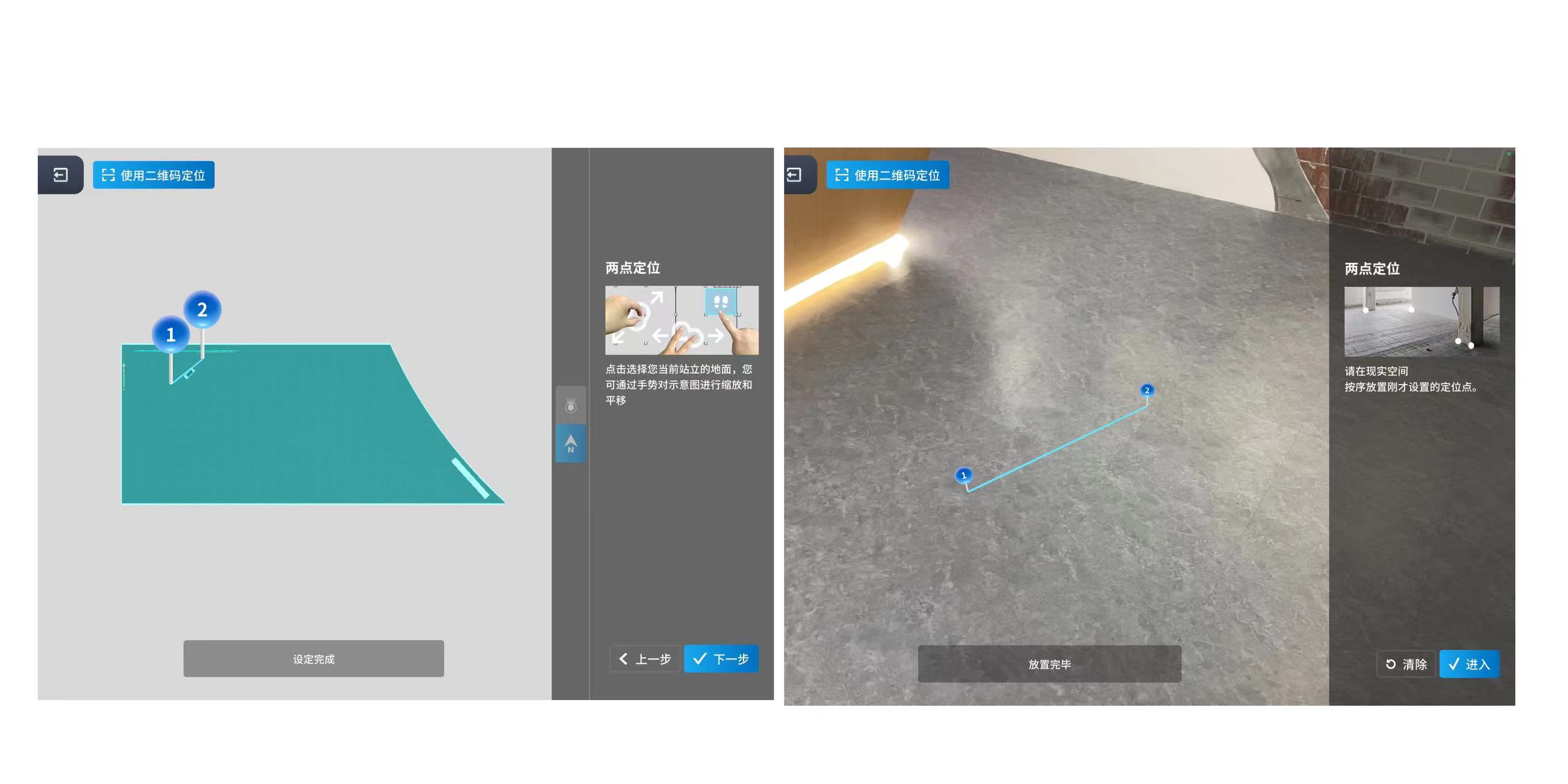
两点定位
室外定位
- RTK设备定位:在室外开敞环境,可以基于地理信息坐标定位的方式,利用以见科技自研的智能定位硬件设备,在室外任意位置通过RTK定位的方式,实现模型基于地理坐标的空间定位。

以见科技自主研发的RTK定位设备
赋能行业,创造价值
基于SLAM与RTK技术,以见在一见®BIM+AR系列软件和一见AR智能硬件中提供室内外厘米级定位方法与系统,并结合大量项目实践,提供完整的工程现场定位显示方案和实施流程,以精准定位和高效显示技术助力见所未建。
建筑工程与市政工程正面临前所未有的挑战,一方面,时代和社会的飞速发展正在激烈地改变AEC行业需要面对的外部物质世界;另一方面,传统的作业方式和手段因古老而面临诸多内部问题。以见以多样创新方案整合BIM数据、增强现实能力、室内外定位方法、物联网数据、人工智能技术,为解决这些问题提出了自己的思考与产品,新事物的发展往往会经历一个备受质疑、到探索再到被接受的阶段,我们由衷相信,更多技术将对建筑全生命周期范式带来拓展和变革。
If you are interested in the 'Onesight AR' series of products, you are welcome to contact us by scanning the code. You may also schedule a product demo. We will provide professional online/offline operation demonstration.